Applications of Machine Learning at LITC
In the last decades, we have been developing applications of Machine Learning in many areas, like mining, energy systems, steel plants, aerial navigation systems and others.

UFMG-IEAv-INPE (UAV Navigation)
During 2016 the collaboration project on Unmanned Aerial Vehicles (UAVs) navigation by images with IEAv (Instituto de Estudos Avançados, Ministry of Defense) and INPE (Instituto de Pesquisas Espaciais) was also active. The projects were funded by CNPq/Universal and MCT/Ministry of defense and involved many students and associate professors in the lab. Our contributions to the project involved embedding learning algorithms into small microsystems for online positioning and also the study of methods to correct both projective and spectral distortions in images captured by UAVs.
Publications
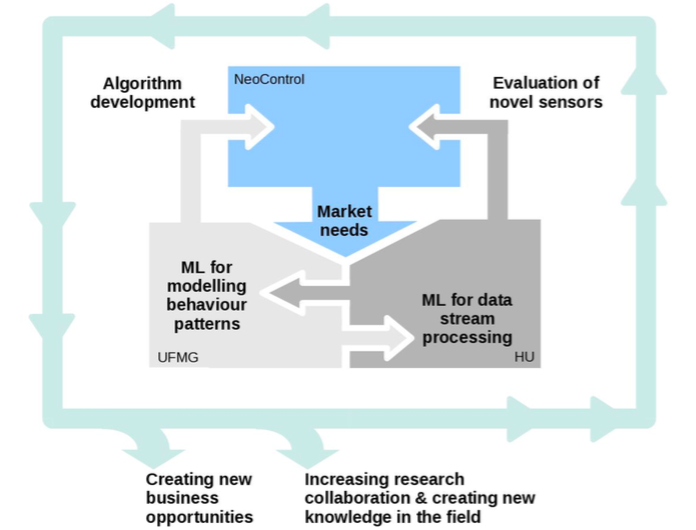
UFMG-Halmstad University (Sweden)-Neocontrol (Smart Home Automation)
This project started in 2016 with seed money from SSF (Swedish Science Foundation) for projects initiated during the AIMday Smart Industries. It involves Halmstad University as a partner and also the local company Neocontrol, a local company that produces home automation equipments. The project involves developing new solutions for home automation problems based on sampled data and machine learning models. The collaboration project is designed to investigate the potential of new products and services by combining networks of sensors and actuators from the Brazilian company Neocontrol with methods for intelligent processing in residential and hotel buildings. The initial step of the project has the objective to survey the market needs and map these requirements to research and development activities within the area of sensor evaluation and algorithm development for intelligent processing. Ultimately a demonstrator will be developed and showcased in an existing realistic home-based setting. The results of the algorithm development and demonstrator tests will be used in a final report where the business opportunities and future plans for larger project are assessed.

UFMG-KTH (Sweden) Communication Infrastructure for Smart Industry
This project with KTH (Royal Institute of Technology, Sweden) is supported by FAPEMIG. It is aimed at research on network infrastructures for Smart Industries and smart energy systems. Its main objective is the study of methodologies and technologies for communication networks of smart CPS (Cyber Physical Systems), aiming at industrial problems. The project started in the middle of 2016 and involves four students and one posdoc at the moment.